 Tech Gadget Central Latest Tech News and Reviews
Tech Gadget Central Latest Tech News and Reviews
Every single week, it seems, engineers and scientists try to improve the robot claw machine. They have even experimented with employing dead spiders. Researchers from Harvard’s John A. Paulson School of Engineering and Applied Sciences (SEAS) have created a new robot with tentacles as the latest innovation in the wacky world of robotics.
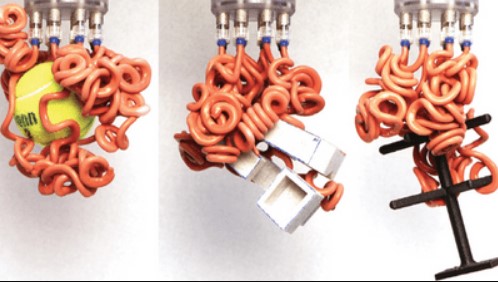
Robots have a famously tough time picking up soft objects since it typically calls for extensive planning and feedback loops. The team has created a brand-new kind of soft robotic gripper that has twelve soft tentacles to entangle the objects, drawing inspiration from nature. They are known as fluidically actuated thin, hollow elastomeric filaments by researchers.
The group of tentacles is more powerful than a single tentacle by itself, similar to how a jellyfish might catch prey. As a result, the robot can lift and wrap around delicate things without cracking them. This method is known as active collective entanglement by the researchers.
First author of the study and former graduate student and postdoctoral fellow at SEAS Kaitlyn Becker said, “By leveraging the inherent compliance of soft robotics and enhancing it with a compliant structure, we designed a gripper that is greater than the sum of its parts and a grasping strategy that can adapt to a range of complex objects with minimal planning and perception.”
And how does it operate?
This robotic gripper uses simple inflation and pneumatics instead of the complicated feedback loops utilized by earlier robotic grippers to operate. The tentacles are hollow tubes that are almost a foot (30 centimeters) long apiece.
Eight of the tentacles are positioned on a circle with a diameter of 50 millimeters (1.9 inches), while the remaining four are arranged on a circle with a diameter of 25 millimeters (0.98 inches). Each tube has a thicker side than the other, which causes curling when pressure is applied.
Although the grasp is strong enough overall to lift the object, each tube only makes a mild touch with the object, protecting its delicate surface. Although not all twelve tentacles are used in every grab, the research team believes that more tentacles might be introduced to boost pickup success rates and cause them to entangle.


