 Tech Gadget Central Latest Tech News and Reviews
Tech Gadget Central Latest Tech News and Reviews
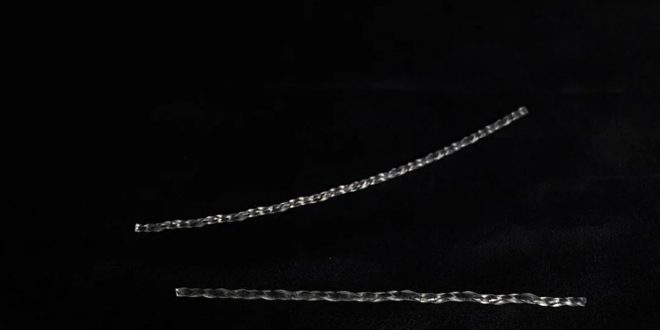
They may look like string, but these tiny objects are much more. Although they lack “brains” or computerized intelligence, these robots can move out of complex spaces.
In 2022, North Carolina State University’s rotini-like soft robots navigated mazes without human or computer input. The tech uses physical intelligence.
Physical intelligence holds that robots’ materials and structure determine their behavior. Without a computer or operator, the robot just does its thing.
The team has improved their previous version to handle more complex situations.
“In our earlier work, we demonstrated that our soft robot was able to twist and turn its way through a very simple obstacle course,” said mechanical and aerospace engineering associate professor Jie Yin. However, it could only turn when faced with an obstacle. In practice, the robot could get stuck and bounce between parallel obstacles.
“We’ve created a soft robot that can turn independently and navigate twisty mazes and moving obstacles. This is done using physical intelligence, not a computer.”
The team used liquid crystal elastomer again. The noodly robot rolls when the material touching the surface contracts at 55°C (131°F). Warmer surfaces go faster.
The design was different this time, but the materials were the same. One half of the new robot is a twisted ribbon that can stretch straight, while the other is a tighter twist that twists on itself.
This asymmetry produces different forces at each end of the robot, preventing it from rolling straight. Watch the video below to see how this unique property helps the robot escape tight spaces.
“The concept behind our new robot is fairly simple: because of its asymmetrical design, it turns without touching an object,” first author Yao Zhao said. It can navigate mazes by changing directions when it ‘does’ touch an object, but it cannot get stuck between parallel objects. Instead, its arcing movement lets it wiggle free.”
Even mazes with moving walls and gaps smaller than its body size are no match for the “maze escaper” robo-string.
Yin said, “This work is another step forward in helping us develop innovative approaches to soft robot design – particularly for applications where soft robots would be able to harvest heat energy from their environment.”



